Onderzoekers van het Robotics Institute (RI) van Carnegie Mellon University hebben een nieuwe technologie ontwikkeld, genaamd SonicBoom. Met dit systeem kunnen robots gewassen zoals appels lokaliseren en herkennen met behulp van geluid in plaats van camera's. Hoewel de techniek nog in de kinderschoenen staat, kan ze in de toekomst tuinbouwrobots ondersteunen bij taken als snoeien of het opsporen van rijp fruit dat achter bladeren verscholen zit.
Volgens Moonyoung (Mark) Lee, promovendus in robotica, kan de technologie de driedimensionale vorm van objecten bepalen door aanraking, zonder dat er een camera nodig is. Dit biedt een oplossing voor een veelvoorkomend probleem in de tuinbouwrobotica: visuele sensoren functioneren vaak slecht in omgevingen met veel bladbedekking, waardoor zowel het fruit als de routes voor robotarmen moeilijk zichtbaar zijn.
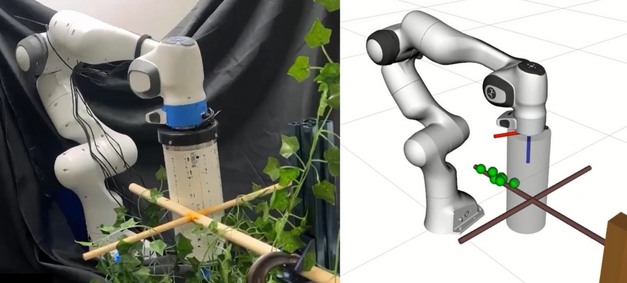 © Carnegie Mellon University
© Carnegie Mellon University
SonicBoom onderscheidt zich van bestaande tactiele sensoren doordat het gebruikmaakt van contactmicrofoons die trillingen registreren wanneer een object wordt aangeraakt. In tegenstelling tot camera-gebaseerde sensoren, die kwetsbaar zijn, of druksensoren, die kostbaar zijn om op grotere oppervlakken toe te passen, zijn contactmicrofoons duurzamer en kunnen ze worden beschermd in stevige behuizingen.
Het prototype bestaat uit zes contactmicrofoons die in een PVC-buis zijn bevestigd. Zodra de buis een object, zoals een tak, raakt, nemen de microfoons trillingen waar. Het systeem trianguleert vervolgens het contactpunt met een nauwkeurigheid van 0,43 tot 2,2 centimeter. De PVC-behuizing beschermt de microfoons bovendien tegen schade.
Voor de training van het systeem verzamelde het team gegevens van 18.000 contacten tussen de sensor en een houten staaf. Met behulp van een machine learning-model werden de audiosignalen gekoppeld aan specifieke contactpunten. De huidige versie is ontworpen om harde of stijve objecten te detecteren, maar aanpassingen in de opstelling kunnen het ook mogelijk maken om zachtere doelen, zoals fruit, te herkennen.
Lee geeft aan dat vervolgonderzoek zich richt op het identificeren van objecten naast het lokaliseren ervan. Buiten de tuinbouw zijn er ook toepassingen denkbaar, zoals veiligheidssystemen voor robots die dicht bij mensen werken, robots die speciaal voor interactie met mensen zijn ontwikkeld, of operaties in omgevingen met weinig licht.
Het onderzoeksteam bestaat uit Lee, RI-hoogleraar Oliver Kroemer, promovendus Uksang Yoo en de RI-faculteitsleden Jean Oh, Jeffrey Ichnowski en George Kantor.
Voor meer informatie:
Cassia Crogan
Carnegie Mellon University
Tel: +1 412 268 2900
[email protected]
www.cmu.edu









